


They look like toys from outer space - motorised, white plastic gizmos crawling blindly on a table - and are hardly what most people would imagine when they think of the future of robots. But the experimental machines being spawned at Brandeis University Demo Lab may well be to robots what Kitty Hawk was to aviation.
The Wright Brothers in this case are Hod Lipson, a mechanical engineer, and Jordan Pollack, a computer scientist. They say their results represent the first time that robots have designed and constructed other robots - a new step towards the autonomy of artificial life.

"Most robotics research is about adding brains to animatronic puppets which is a lost cause," says Pollack. "In nature the body and brain co-evolve together, like the chicken and the egg. There never is one without the other."
Their work vividly demonstrates the significance of co-evolutionary robotics, a field that stresses the coordinated adaptation of bodies (the hardware) and brains (the software). Electromechanical systems driven by neural networks are evolved inside simulations to yield robotic blueprints that are then automatically manufactured and work in the real world.
Lipson, a researcher in design automation, envisioned and designed computer software to simulate and evolve truss structures which are fixed bars connected at points. The new twist, according to Lipson: "Trusses are well understood engineered structures; we replaced fixed points with ball joints, and added variable length motors driven by artificial neurons to act as muscles and brains. Now we have an accurate simulator for a universe of machines operating much faster than realtime."
Evolutionary computation, a speciality of Pollack's lab, provides methods for searching such a universe using variation and selection. Here, simulated machines are varied by changing the connectivity and weights of neurons, the location and lengths of bars etc and are selected for reproduction based on their locomotion ability: A is better than B if A can travel farther than B in a specified period of simulated time.
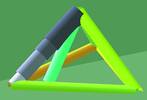
It takes a few days for the software to construct bodies-with-brains that best optimise the fitness function. Each run results in diverse locomotive mechanics and control circuits, all created without human knowledge. For example, one has a leg in the middle of its body to ratchet itself along the floor (Figure 2), while another swims the breaststroke on land (Figure 3). During a 'solidification' process, points and lines inside the computer simulation are automatically transformed into ball-joints and cylinders, providing a geometric blueprint of a machine which can be automatically constructed for about $250, and then recycled.

To get to that next step, Pollack and Lipson landed a DARPA grant and bought a rapid prototyping machine that constructs 3D shapes from computer models. Says Lipson: "The solidified design is sent from the evolution system to the RP machine, and simulation becomes reality. The entire system - of simulation, evolution, and construction - is nearly a self-replicating artificial life system."
"There still are humans involved," says Pollack, "but we just work for the robots, attaching their motors and downloading their brains into a microprocessor. The designs emerge from the interaction of physics and evolution."
They say future experiments will involve more complex environments and sensors, so that the robots can react to obstacles and other robots. They expect this will lead to more elaborate body and brain structures.
The scientists believe their work is a significant step toward realising robots that are inexpensive enough to be economically sustainable: "If we eliminate the human engineers, we can do for disposable robots what Bill Gates did for software releases," says Pollack, "make them so affordable that everyone can own 100."
To see the research visit www.demo.cs.brandeis.edu/golem


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version